Note
Go to the end to download the full example code.
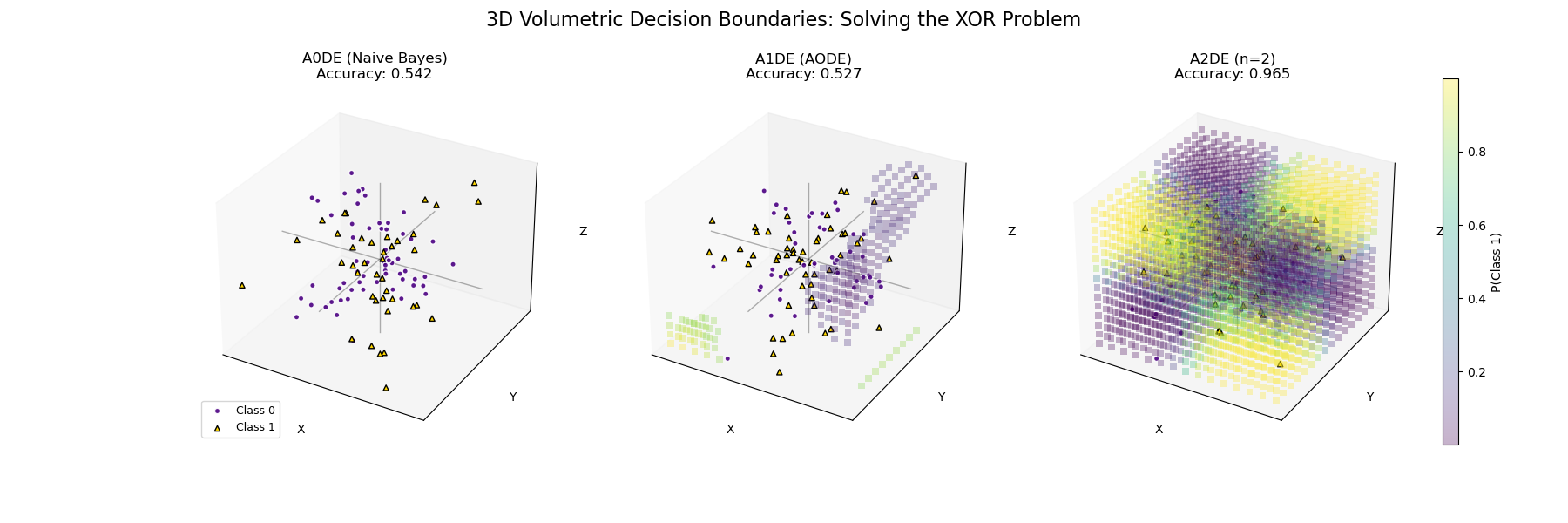
3D Voxel-Cloud Visualization: XOR Structure#
To visualize the 3D decision boundaries clearly, we plot a dense cloud of points (voxels) colored by the predicted class probability.
This reveals the internal geometry of the classifier: - A0DE: Shows a uniform blob (fails to separate). Accuracy ~0.5. - A1DE: Also fails to find structure (linear/planar cuts insufficient for 3D parity). Accuracy ~0.5. - A2DE: Shows a distinct 3D Checkerboard pattern (perfect solution).
Training models...
Generating volumetric grid...
# Author: The scikit-bayes Developers
# SPDX-License-Identifier: BSD-3-Clause
import matplotlib.pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import Axes3D # noqa: F401
from sklearn.metrics import accuracy_score
from skbn.ande import AnDE
from skbn.mixed_nb import MixedNB
# --- 1. Generate 3D XOR Dataset ---
np.random.seed(42)
n_samples = 2000
X = np.random.randn(n_samples, 3)
# 3D Parity Logic: Class 1 if product of signs is positive
y = (np.sign(X[:, 0]) * np.sign(X[:, 1]) * np.sign(X[:, 2]) > 0).astype(int)
# --- 2. Fit Models ---
print("Training models...")
models = [MixedNB(), AnDE(n_dependence=1, n_bins=4), AnDE(n_dependence=2, n_bins=4)]
names = ["A0DE (Naive Bayes)", "A1DE (AODE)", "A2DE (n=2)"]
fitted_models = []
scores = []
for model in models:
model.fit(X, y)
acc = accuracy_score(y, model.predict(X))
fitted_models.append(model)
scores.append(acc)
# --- 3. Generate Prediction Grid ---
print("Generating volumetric grid...")
# Create a simpler grid for visualization (less dense than before for clarity)
n_grid = 15
grid_range = np.linspace(-2.2, 2.2, n_grid)
xx, yy, zz = np.meshgrid(grid_range, grid_range, grid_range)
X_grid = np.column_stack([xx.ravel(), yy.ravel(), zz.ravel()])
# --- 4. Plotting ---
fig = plt.figure(figsize=(18, 6))
for i, (model, name, score) in enumerate(zip(fitted_models, names, scores)):
ax = fig.add_subplot(1, 3, i + 1, projection="3d")
# Predict probabilities
probs = model.predict_proba(X_grid)[:, 1]
# Visualization Trick:
# Plot points where the model is confident.
# High prob (Yellow) and Low prob (Purple).
mask = np.abs(probs - 0.5) > 0.1
xs = X_grid[mask, 0]
ys = X_grid[mask, 1]
zs = X_grid[mask, 2]
c_vals = probs[mask]
# 1. Plot Voxel Cloud (Model Belief)
# cmap='viridis' matches our theme: 0 (Purple) -> 1 (Yellow)
p = ax.scatter(
xs,
ys,
zs,
c=c_vals,
cmap="viridis",
s=30,
alpha=0.3,
edgecolors="none",
marker="s",
)
# 2. Overlay Real Data Points (Ground Truth)
# Subsample to avoid cluttering the 3D view
mask_sub = np.random.choice(n_samples, 100, replace=False)
X_sub = X[mask_sub]
y_sub = y[mask_sub]
# Class 0 -> Indigo Circle
ax.scatter(
X_sub[y_sub == 0, 0],
X_sub[y_sub == 0, 1],
X_sub[y_sub == 0, 2],
c="indigo",
marker="o",
s=20,
alpha=0.9,
edgecolors="w",
label="Class 0",
)
# Class 1 -> Gold Triangle
ax.scatter(
X_sub[y_sub == 1, 0],
X_sub[y_sub == 1, 1],
X_sub[y_sub == 1, 2],
c="gold",
marker="^",
s=20,
alpha=1.0,
edgecolors="k",
label="Class 1",
)
# Add axes lines crossing at zero for reference
ax.plot([-2.5, 2.5], [0, 0], [0, 0], "k-", lw=1, alpha=0.3)
ax.plot([0, 0], [-2.5, 2.5], [0, 0], "k-", lw=1, alpha=0.3)
ax.plot([0, 0], [0, 0], [-2.5, 2.5], "k-", lw=1, alpha=0.3)
ax.set_title(f"{name}\nAccuracy: {score:.3f}", fontsize=12)
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlabel("Z")
# Cleaner look
ax.set_xticks([])
ax.set_yticks([])
ax.set_zticks([])
ax.set_xlim(-2.5, 2.5)
ax.set_ylim(-2.5, 2.5)
ax.set_zlim(-2.5, 2.5)
# Add colorbar
cbar_ax = fig.add_axes([0.92, 0.15, 0.01, 0.7])
fig.colorbar(p, cax=cbar_ax, label="P(Class 1)")
# Add legend to the first plot only (to save space)
axes_3d = fig.get_axes()[0]
axes_3d.legend(loc="lower left", fontsize=9)
plt.suptitle("3D Volumetric Decision Boundaries: Solving the XOR Problem", fontsize=16)
plt.show()
Total running time of the script: (0 minutes 0.155 seconds)